McMurdo Station, Antarctica
September 9, 2016
After more than a week of preparations and delays Mark and I were finally able to do some unmanned aerial vehicle (UAV or drone) flights over the past two days. Doing these flights is the reason we’ve come to Antarctica. The UAV that we use is called a SUMO (Small Unmanned Meteorological Observer) and is basically a remote controlled plane, like you could buy in a hobby store, but it is outfitted with an autopilot and weather sensors.

One of our SUMO UAVs sitting on the snow at the Pegasus runway before a flight.
We are using the SUMOs to study the lowest few thousand feet of the atmosphere. (I’ll describe some of the science we are doing in the next few paragraphs but feel free to skip down to find out how we fly these planes and see a couples of videos of us launching and landing the SUMOs).
The lower part of the atmosphere is called the boundary layer and it is the portion of the atmosphere that interacts directly with the underlying surface. Energy, moisture, momentum, and gases (like CO2) are transferred between the surface, whether it is ice, grass, forests, deserts, oceans, or mountains, and the atmosphere within the boundary layer. In order for us to understand how the atmosphere and the surface will change, either on short time scales if we are forecasting the weather or longer time scales if we are thinking about climate change, we need to understand how the atmospheric boundary layer behaves. On a more practical level we all live in the boundary layer and any improved understanding we can gain of boundary layer processes will allow us to better understand this part of the atmosphere that we experience every day.
In the past there have been very few measurements of the Antarctic boundary layer. Most of the weather observations from the Antarctic come from automatic weather stations, like I’ve worked on in previous Antarctic trips, but these only measure conditions just a few feet above the ground.
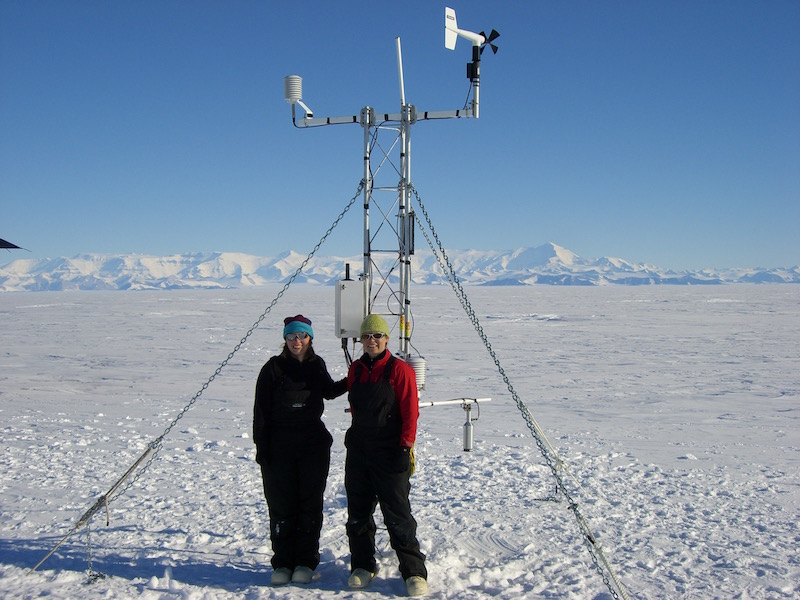
My friends and colleagues Shelley Knuth (left) and Melissa Nigro (right) with one of the Antarctic automatic weather stations my research group helps maintain. This weather station is located on the southern Ross Ice Shelf and is named after my daughter Sabrina. (Photo taken by Shelley Knuth).
To fully understand the boundary layer we need to make measurements through the entire depth of this portion of the atmosphere. Since 2009 my research group has been using drones to make these types of measurements in the Antarctic. In January 2014 Melissa Nigro and I spent two weeks camping on the Ross Ice Shelf making measurements with SUMO UAVs.

Temperature data collected from 12 SUMO flights on January 20th and 21st 2014.
The temperature changes shown on the graph above allow us to determine how much heat is being transferred from the surface into the atmosphere or from the atmosphere to the surface. We also use this data to evaluate Antarctic weather forecasting and climate models. The measurements shown above represent Antarctic summertime conditions. The work we are doing in Antarctic now is providing us with data from the late Antarctic winter.
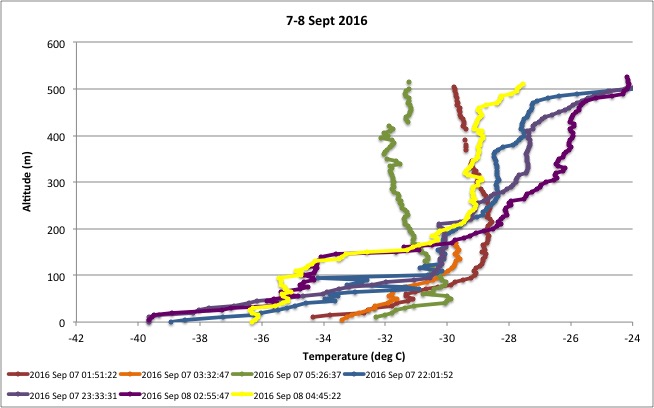
Temperature data collected from 7 SUMO flights on September 7th and 8th 2016.
Next January I will come back to Antarctica to make SUMO measurements in the Transantarctic Mountains in an area known as the Dry Valleys. Next April to June I’ll take part in a research cruise and will make SUMO measurements over the sea ice in the Ross Sea during the middle of the Antarctic winter.
So, how do we operate the SUMO UAVs? As I said above, the SUMO is a remote controlled plane, similar to what you could buy in a hobby store. The SUMO is battery powered and can fly for 30 to 40 minutes on a single charge. We can control the SUMO with either a standard remote control or by using the autopilot and ground control software on a laptop computer.

For the flights we are doing this month we are using a van as our mobile base of operations. Here I am in the back of the van preparing a SUMO for launch. The temperature at the time this photograph was taken was -40 F so it is really nice to have a bit of shelter from the cold and wind as we get the SUMO ready for flight. (Photo taken by Mark Seefeldt).
Once the SUMO has been prepared it is time to launch it. The launch is very simple – I basically throw the SUMO into the air and start controlling it with the remote control. (Click on the link in the caption to see the video)
Video of a SUMO launch at the Pegasus ice runway on September 8th 2016. At the start of the video you can hear the SUMO engine start up. I control this from the remote control but because I’m holding the SUMO in one hand I use my chin to push the throttle on the remote control. My right hand will control the SUMO’s climbing and descending and turning.
Once the SUMO is in the air and flying stably I switch control from the remote control to the autopilot and the ground control software. The ground control software lets us program specific flight plans that allow us to sample the atmosphere at exactly the locations we are most interested in. For our boundary layer studies we program the plane to spiral up from the surface to a few thousand feet above the ground and then return for a landing.
During the flight we can watch the plane’s progress on a laptop computer in the van. The SUMO transmits data to an antenna and modem attached to the computer.

Mark watching the SUMO during a flight on September 8th 2016.
The ground control software shows us the plane’s location, what portion of the flight plan is currently being executed, information about the plane’s orientation, attitude, speed, and battery voltage, and information about the weather conditions.

Here is what we see on the ground control software on our laptop. The top portion of the screen shows a map with a yellow line showing the track of the SUMO over the past few minutes. The numbers on the top right side of the screen show the pressure (949.6 mb), the relative humidity (58%), the temperature (-33 deg C), and the aircraft ground speed (16.5 m/s). The bottom half of the screen includes additional information about the aircraft (like battery voltage (11.7 volts) and information on the GPS (3d GPS position) and communications status (OK)), provides buttons to switch to different autopilot options (currently in Prof/Low), and an artificial horizon to show the planes attitude.
Once the SUMO has completed the pre-programmed flight the autopilot brings the plane into a low circling orbit above our van. I then take control of the plane with the remote control and bring it in for a landing.
Video of a SUMO landing at the Pegasus ice runway on September 8th 2016. The halo around the sun at the end of this video is caused by the ice fog. The two bright spots to the left and right of the sun are called sun dogs. The bright purple line below the sun is an artifact from the camera.
It looks like we may have some stormy weather the next few days so we won’t be flying our SUMOs in those conditions. Below are two photos from our drive back from the Pegasus runway to McMurdo yesterday that can give you an idea of what a storm looks like down here . The drive back to town takes about 30 minutes and halfway back the wind picked up creating blowing snow. That combined with the fog reduced visibility to just a few hundred feet at most.

Our van in near whiteout conditions on the drive back to McMurdo yesterday.

Of course Mark and I needed to experience the stormy weather so we stopped the van and got out to take some pictures. The temperature was around -27 deg F and the wind was blowing 20 to 30 mph. It was really cold and nasty. We didn’t stand around too long before getting back in the van. Notice the red flags behind me. These are used to mark the road. At times we could only see one flag in front of us. Had the visibility dropped any more we would have had to stop and wait for the winds to drop. This storm is an example of condition 2 weather. (Photo taken by Mark Seefeldt)
Hey, so glad to see and follow the success down there with the SUMO. Keep up the great work I will share this link with my family and friends.
VERY cool, John!
Thank you for sharing this information with us.
Great to see SUMO in action again in Antarctica.
Good Luck With the operations and I hope you get a lot of good data out of it!