31 March 2020
It took us much longer than we had expected, but last Monday (23 March) Gina and I did our first DataHawk drone flights of the MOSAiC expedition. These were also the first scientific drone flights of MOSAiC. The data that we collect as we fly our DataHawks will allow us to study how the atmosphere changes in response to the varying surface conditions in the Arctic. It is, in fact, this mosaic of surface types – thick and thin ice with varying depths of snow cover as well as leads, and in the summer melt ponds, that motivated the MOSAiC acronym.
It was a tremendous relief for us to finally have our planes flying. Over the last 2+ months we faced a longer than expected transit to the Polarstern, on the Russian ice breaker Dranitsyn, and then dealt with stormy weather and an unstable ice floe once we reached the MOSAiC field camp in the central Arctic Ocean.
As I described in my last blog post, shortly after we established our base for drone operations near met city, our ice floe experienced a significant lead event that isolated met city from the rest of the MOSAiC floe. This forced us to relocate our drone operations to a more easily accessed site, Droneville. Even after we relocated to Droneville stormy weather lasted for several days, further delaying our first flight.

Caption: Droneville tent and Polarstern in stormy weather.
Two Saturday’s ago (21 March), after all of the delays, we were finally ready to do our first DataHawk flights. Gina and I were just about finished with our pre-flight setup and tests, which take about 10 minutes, when we ran into a problem. Part of our pre-flight check involves verifying that the throttle setting in both autopilot and manual mode is working correctly. When we did this test with the autopilot the motor on the plane revved inconsistently, going between full throttle and idle, despite the autopilot issuing a full throttle command. We then tested a second plane and found the same behavior, which meant that it wasn’t safe for us to fly the planes in autopilot mode.
Gina and I were still anxious to fly and we decided to do a manually controlled flight instead, with one of us flying the plane with a model plane remote control (RC). But, even this simpler goal was beyond our reach on this day.
The DataHawk is launched with a large bungee cord that pulls the plane along a set of metal rails and into the air. This is a very elegant and safe way to launch these planes but at temperatures near -20 deg F the rubber in our bungee cord is a lot less elastic than normal. When we stretched the bungee cord to its full length and attached it to the DataHawk it felt like there was enough tension on it for a successful launch.

Caption: A DataHawk drone sitting on the launch rails. During an actual flight the DataHawk would be connected to a long bungee cord that pulls the plane along the rails and into the air.
Gina held the plane in place on the launch rails and counted down for the launch while I stood behind her with the RC so I could take control of the DataHawk as soon as it cleared the launch rails. When Gina let go of the plane it accelerated down the rails, but not fast enough. The rubber in the bungee wasn’t springing back as fast as normal, and before the plane’s motor could generate enough speed for the plane to fly it had done a smooth landing on the ice just 30 feet from where it had started. It was a depressing end to our first day of trying to fly our drones. Gina showed the video she shot of our attempted flight at our nightly all-hands meeting on the ship and we received a lot of sympathetic comments from the others onboard.
After exchanging e-mails with colleagues back at the University of Colorado we were offered some solutions we could try. We spent Sunday testing the changes to the autopilot code that they suggested, but we were unable to reproduce the throttle problems we had on Saturday and so we couldn’t be certain if the code changes were working. Finally, on Monday morning we were able to reproduce the throttle problem and verify that once the autopilot code was changed the problem with the throttle went away.

Caption: Gina and I testing the DataHawk throttle alongside the Polarstern. (Photo by Eric Brossier).
We also decided that keeping the bungee cord at a constant temperature, and storing it in our tent at Droneville, rather than on the ship overnight, would help ensure a consistent elasticity which would allow us to correctly tension the bungee cord before a flight. With these two fixes in place we were finally ready for our first flight.

Caption: John stretching the launch bungee while Gina waits to connect the DataHawk to the end of the bungee cord. (Photo by Eric Brossier).
To say that we were anxious to start flying would be a serious understatement. Our colleagues on the Polarstern were equally anxious for us to have a successful flight and we had a small group of “paparazzi” with us when we went out to Droneville for our first flight last Monday. Among the spectators were Dieter and Manuel, who are filming for a German documentary about MOSAiC. After going through our pre-check routines and not finding any problems we placed a DataHawk on the bungee launcher. My heart was racing in anticipation as I worried about whether or not we had solved all of our problems.

Caption: The launch of our first successful DataHawk flight. Manuel and Dieter are on the left filming the flight. Gina is in the center of the photo. She has just released the DataHawk which has been pulled past the end of the launch rails by the bungee cord. I am standing on the right, ready to control the plane with the RC in manual mode if needed.
The plane accelerated down the launch rails, a bit slower than I would have liked, and it appeared that the autopilot wasn’t going to be able to react quickly enough to get the plane into the air. On instinct, I switched to manual control and pushed the plane to full throttle as it began to dip down towards the ice. And just like that, it began to climb and made a graceful turn in front of the sun. We had our first DataHawk in the air. I had a huge smile on my face and felt a tremendous sense of relief.

Caption: A DataHawk in flight just after leaving the launch rails. The black line in this photo is the bungee cord pulling the plane towards a successful launch. (Photo by Manuel Ernst and Dieter Stürmer).
I switched the plane back into autopilot and we verified that it was working well. We kept this flight short since it was only a test flight and after 10 minutes I took manual control of the plane once again as I prepared to land it. The DataHawk can take off and land in autopilot mode, but it is usually safer to land the plane in manual mode.

Caption: The DataHawk banks into a turn to begin its pre-programmed autopilot flight. (Photo by Manuel Ernst and Dieter Stürmer).
Of course, our first flight wouldn’t be a success without a safe landing. But, even after more than 2 months of not flying I was able to bring the plane in gently and watch it slide to a stop not far from the launch rails. Gina and I both breathed a huge sigh of relief. Our colleagues cheered us for the successful flight and we posed for lots of photos to commemorate our first Arctic flight.

Caption: Gina and I walking back to our Droneville tent with a DataHawk after a successful flight. (Photo by Christian Rohleder).
It had been a very long road to get to this point. Gina and I had spent most of the past year training to fly DataHawks in Colorado, went through various safety courses last summer to allow us to take part in the MOSAiC expedition and finally spent more than 2 months traveling to the middle of the Arctic Ocean for this moment. The sense of accomplishment is so much greater the harder that you have to work to achieve a goal and this was definitely a difficult goal for us to achieve.
Since this first flight we’ve continued to fly when the weather has allowed. Stormy weather with strong winds has kept us from flying some days but we’ve now flown on 4 days and have done seven flights. Gina and I have each taken turns as the RC pilot or operating the ground control computer. The ground control computer allows us to monitor the flight and issue commands to the autopilot.
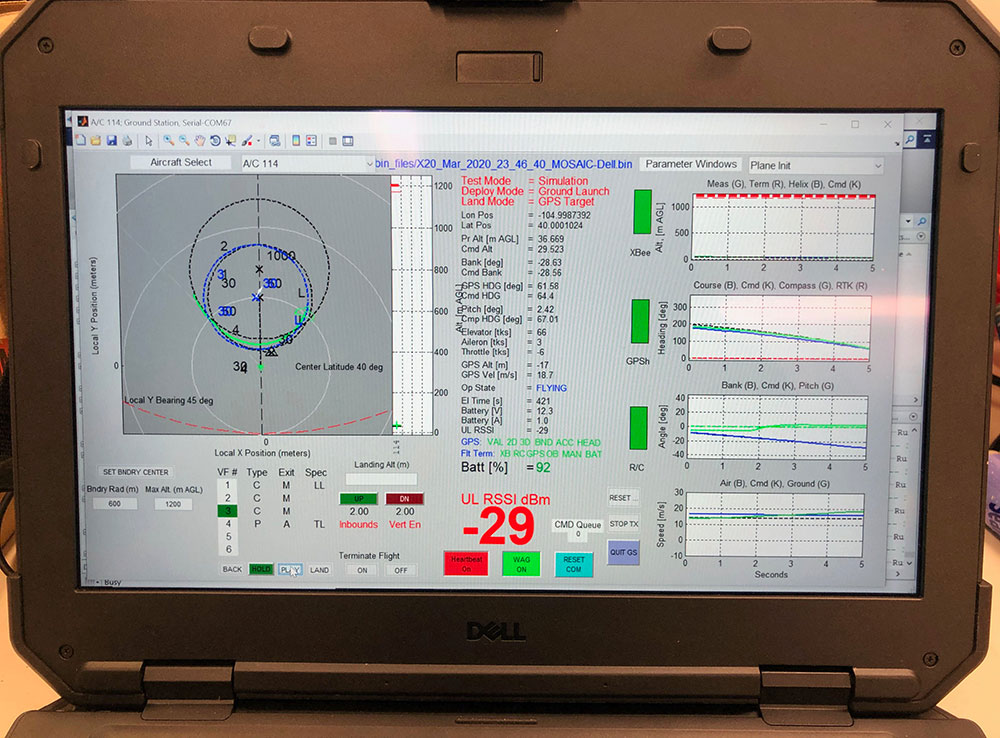
Caption: The ground station software allows us to monitor the DataHawk during a flight. The left side of the screen shows a map with pre-programmed flight paths and allows us to alter what part of the flight plan the plane follows. The center and right side of the screen display information about the DataHawk and allow us to make sure that the plane is flying as expected.
Our flights last about 30 to 40 minutes and during this time the RC pilot needs to keep an eye on the plane as it circles as much as 3000 feet overhead. If everything is working as it should this is a pretty boring 30 to 40 minutes, although Gina and I continue to communicate with the ground control pilot relaying information about altitude and battery voltage to the RC pilot.

Caption: John watching a DataHawk circling far overhead. (Photo by Christian Rohleder).
The data we have collected so far already shows lots of interesting features. We’ve observed strong temperature inversions, with the temperature increasing rapidly with height in the atmosphere. Inversions occurs in response to the strong cooling at the ice surface. We’ve also seen low level jets in our wind data. Low level jets form in response to large temperature gradients. And, we’ve also seen situations where the state of the bottom of the atmosphere is relatively uniform due to turbulent mixing from strong winds.
We are still facing a lot of challenges. The weather remains cold, although not as cold as when we first arrived at the Polarstern in early March, but working outside with temperatures into the -20s F is difficult. The frequent stormy weather is frustrating and our ice floe continues to be dynamic. The first thing I do every morning after I wake up is to go to the bridge of the ship to see what has changed on our floating ice home and to verify that our little Droneville tent hasn’t fallen into a lead or been swallowed by a ridge. And, we also face an uncertain timeline of when we’ll be able to return home to our families and friends as a result of the coronavirus impacts. We will continue to fly our drones in the Arctic until we can get home and then we’ll pass our work on to colleagues that will come from Colorado to replace us for the next several months of the MOSAiC expedition.
John
Congratulations on the flight and best wishes for continued safety, success and the opportunity to return home soon!
I’m always amassed to see how people use drones in scientific purposes. I’m also drone enthusiast and run my drone blog page Ultimate Drone Flying.
Use cases like this should be shared. I have post your page on my FB fan page for people to see the good work you do.
Great work guys.