It has been a busy, but frustrating, week since I last wrote. We’ve been working hard trying to get our UAVs to Terra Nova Bay to make the measurements we need for our research but we keep running into problems.
After our local test flight last Sunday (9 September) we had a couple of days of windy, stormy weather. The weather deteriorated to condition 1 (the worst weather conditions) at the runway we use for our UAV flights and condition 2 weather in McMurdo. The condition 2 weather was due to strong winds, blowing snow, and reduced visibility. At the runway the weather station we installed at our hangar measured a peak wind of 84 mph during this storm. You can see some video I shot around town during the worst of the weather, when winds were gusting to 50+ mph and visibilities were, at times, down to 100 feet. The stormy weather kept our UAVs grounded for three days.
On Thursday (13 September) we were finally able to get back to the Pegasus ice runway and fly our UAVs again. Our plan was to send two Aerosonde UAVs to Terra Nova Bay for overnight flights. We do overnight flights because our missions last about 14 hours and the length of daylight in a single day isn’t long enough to allow us to take-off, fly for 14+ hours, and then land with enough daylight for both a safe take-off and landing. Below is a sequence of photos taken during one of the Aerosonde launches.




The first plane took off with no problems and after a brief period circling the runway while we made sure everything was working properly we sent the plane on its way to Terra Nova Bay.

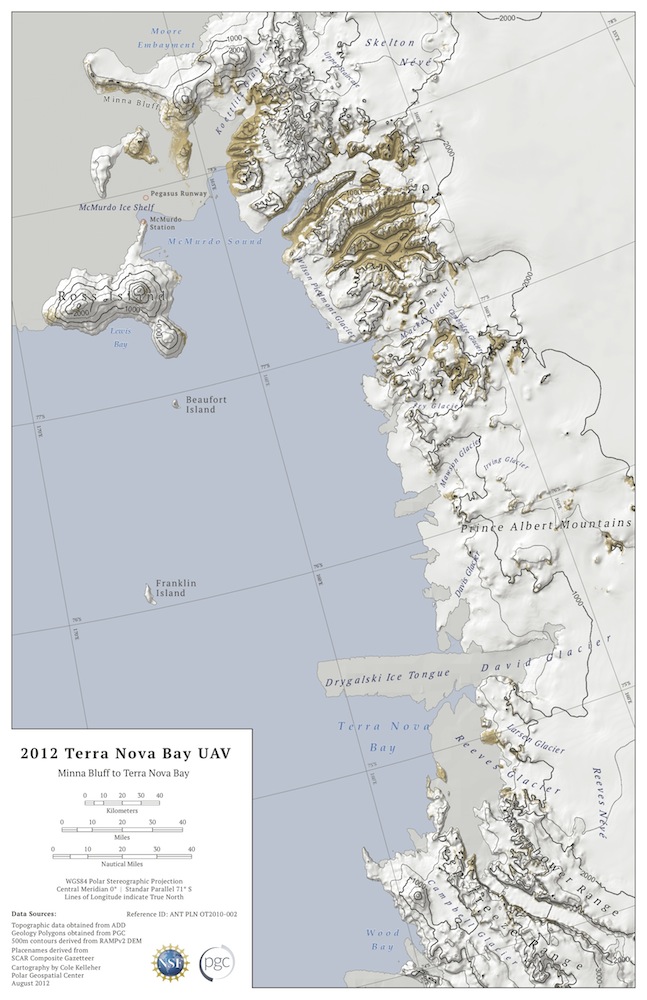
We fly our planes from the Pegasus runway (near the top of the map) to Terra Nova Bay (near the bottom of the map). Note that north is towards the bottom of this map.
We had the next UAV prepped and ready for launch about an hour later.
As you can see in this video the take-off didn’t go as expected. The plane took off from the launch vehicle but then immediately landed. When we looked more closely at the plane the reason for the quick landing was obvious – the propeller had come off during the take-off and the plane had no thrust. Cam did a fantastic job controlling the plane during this take-off and landing. As you can see in the video it was almost impossible to see what the plane was doing after it left the launch truck and Cam was still able to land it safely despite that.
For the overnight flights we control the UAVs from a ground control station in our lab in McMurdo. This is a bit more comfortable than the hut we have at Pegasus.

Shelley and Paul watching the ground control computers during an Aerosonde UAV flight.
When the launch team, myself included, got back to McMurdo Paul (who was flying the UAVs from our ground control station in McMurdo) told us that he’d lost communications (comms) with the plane.
Once the UAV leaves the immediate area of McMurdo all comms are through an Iridium satellite phone and modem on-board the aircraft. It is common for the Iridium connection to get dropped (just like a cell phone conversation) but typically we can call back and re-establish comms with the plane relatively quickly. In this case the plane was out of contact for almost 2 hours. During this time we were left wondering whether it was simply a communications problem or if the plane had crashed. Eventually comms were re-established as the plane was nearing Terra Nova Bay. We were excited to finally be at the cusp of getting the data we came to Antarctica for. Unfortunately we soon lost comms with the plane again and didn’t hear from it for another few hours. The plane continued to follow a pre-programmed flight plan and by the time we had re-established contact with it it was on its way back to the Pegasus ice runway. It circled the runway until early morning when it was light enough to land it safely.
The flight was only a limited success because without active comms with the plane while it was in Terra Nova Bay we were unable to measure the features of most interest. We are trying to make measurements in the strong winds that blow off of the continent and over the ocean at Terra Nova Bay. These strong winds, known as katabatic winds, vary in position and strength from day to day. By monitoring the winds being reported by the plane in real-time we can identify the area of strongest winds and can then direct the plane to make additional detailed measurements in that area. By not being able to communicate with the plane we couldn’t find the strongest winds and thus couldn’t make the measurements we wanted to.
Since the plane that we flew for this mission was the same one that had comms problems last Sunday we decided that there was a problem with the Iridium phone and modem on this plane and decided not to fly this UAV again.
The following day we launched two more UAVs just before sunset and sent them on their way to Terra Nova Bay. Once again, after a few hours of flight time we lost Iridium comms with both planes. Rather than risk the aircraft by flying them all the way to Terra Nova Bay the planes were pre-programmed to return to the Pegasus runway if they lost comms for an extended period of time. Both planes returned to Pegasus after we had a few nervous hours waiting for contact to be re-established.
While the planes are close to the Pegasus runway we can communicate with them via 900 MHz radio so we decided to do some scientific flights in the area around Pegasus. There are several mountains in the area that create interesting weather and we wanted to make measurements around these mountains. Unfortunately just before sunrise one of the planes crashed. We suspect that the pitot tube (used to measure air speed) iced up as we flew through some clouds and without reliable air speed measurements the autopilot was unable to control the UAV. Needless to say it was a somber day in the lab on Saturday.
The plane crashed near Mt. Erebus, on Ross Island, not far from McMurdo. Unfortunately the plane crashed in area covered by crevasses, which makes overland travel to retrieve it unsafe. Once the main summer season starts in McMurdo personnel at the base may try to fly out to the crash site in a helicopter to retrieve the UAV.
After all of the Iridium comms issues we had during the previous flights we realized that the problem wasn’t specific to a single plane and suggested that there was a systematic problem. This surprised us since the Iridium phones and modems that we are using are the same ones we used for our Antarctic UAV flights in 2009. Obviously something has changed in the software that controls the phone or modem or with the Iridium network since our 2009 flights. Peter, Paul, Nick, and Cam are all working hard to find a solution to the problem and they have several leads they are tracking down. Hopefully by tomorrow we’ll have some solutions in place and be able to try for another flight to Terra Nova Bay.
In the meantime Shelley and I went out to the Pegasus runway on Sunday to do some flights with our small, hand launched SUMO (small unmanned meteorological observer) UAVs.

Here I am with the SUMO UAV at the Pegasus ice runway.
We did three flights Sunday afternoon. You can see a video of the SUMO launch here.
We’ve been flying the SUMO in a completely automatic mode. All we need to do is launch the plane and then a laptop running an autopilot program is able to control the rest of the SUMO flight.

Shelley is watching the SUMO autopilot software on a laptop computer in the back of our van. All of the bags in the back are our survival gear in case we get stuck on the road between Pegasus and McMurdo.

The SUMO UAV flying over the Pegasus runway.
You can see a video of the SUMO landing on autopilot here.
The goal of these flights is to measure the lowest few thousand feet of the atmosphere, known as the boundary layer. It is in this layer that the atmosphere interacts with the ground. It is this interaction which shapes the weather we experience and is important for climate studies since this layer is responsible for the heat, moisture, and momentum transferred between the atmosphere and the surface. The plan for our SUMO flights is to conduct flights every hour so we can collect data that shows how the boundary layer evolves over time as we move from day to night. The computer models that are used to forecast the weather and make climate change projections have a hard time simulating this aspect of the atmosphere and we hope that our measurements can be used to improve these models.

This plot shows the SUMO UAV measurements of how temperature changes with height at two different times on the 16th. The measurements were made about 6 hours apart (1431 and 2055 or 2:31PM and 8:55PM) and show the cooling over the lower part of the atmosphere that took place during this time. This cooling is seen as the shift towards the left from the purple to the red lines. The nearly horizontal line at the bottom of the red curve is a strong inversion where temperature rapidly increases with height. In this case the temperature increases a bit more than 2 deg C (about 4 deg F) over the lowest 30 feet of the atmosphere. Strong inversions like this are characteristic of the Antarctic and one of the features we’d like to study in detail.
Strong inversions result in an optical phenomenon known as a fata morgana. A fata morgana is similar to the phenomenon that causes you to see mirages on hot summer days. With a mirage you see blue shimmering on the ground that looks like water. What you are really seeing is light from blue sky that is refracted (bent) by the rapid change in temperature from the very hot, sun heated, ground, to the cooler air above. In this case light that should be coming from above is bent such that it looks like it is coming from below.
For a fata morgana to occur a strong temperature inversion, with cold ground and warmer air, must be present. This is the exact opposite of what occurs when we see a mirage on a summer day. The rapid increase in temperature from the ground to the air in the inversion causes light to be refracted such that light from below appears to be coming from higher up. What your eye sees when this happens are objects on the horizon that appear taller than they really are. The picture below shows a fata morgana at the base of the Transantarctic Mountains. The fata morgana is the cliff-like feature right at the base of the mountains. In reality there is no cliff at the base of these mountains but the refraction of light reflected off of the base of the mountains makes the base of the mountains stretch vertically and appear to be a cliff.

Early Arctic explorers would see fata morgana created by drifts of snow or ridges of sea ice. These fata morgana would appear to be distant ice castles or cities to the weary explorers.
During our SUMO flights on Sunday afternoon we collected some interesting data and returned to Pegasus after dinner on Sunday night to do additional SUMO flights throughout the night.

A time lapse photo of the SUMO flying overhead at night. The trail of lights are the red and green lights on the wing tips and the white flashing light at the tail of the aircraft.
Unfortunately after our first night flight the van we use to go from our hangar to the launch site died. This van has given us a lot of trouble over the last 3 weeks, including the throttle getting stuck wide open, various oil and transmission fluid leaks, a shock falling off, and finally dying on us last night. We had to call back to McMurdo to get a lift back to town as we were the only people at Pegasus last night. Eventually a bulldozer towing a large, plastic sled arrived. We loaded our van onto the sled (known as a magic carpet) and got pulled back to McMurdo.
As you can see we’ve been busy and have had a lot of long nights where we’ve been up all night watching our UAVs. The lack of sleep and disruption to a normal sleep schedule is hard but it does have some rewards. I love watching the night sky here and on Thursday night we were treated to a display of the Southern Lights. Here are a few photos from that night.

Ob Hill and stars.

The aurora australis (southern lights).
John,
Very interesting, I like the in depth blog reporting and provides context to research you are now conducting on the ice. Say hi to Shelly.
Wayne
Sorry to hear about the frustrations. The star pictures are AMAZING!!
Thanks Laura.