Remotely Operated Vehicles (ROV) are unoccupied underwater robots, connected to an operator via a series of cables. The connecting cables transmit command and control signals to and from the underwater vehicle and the operator, allowing remote navigation of the vehicle.
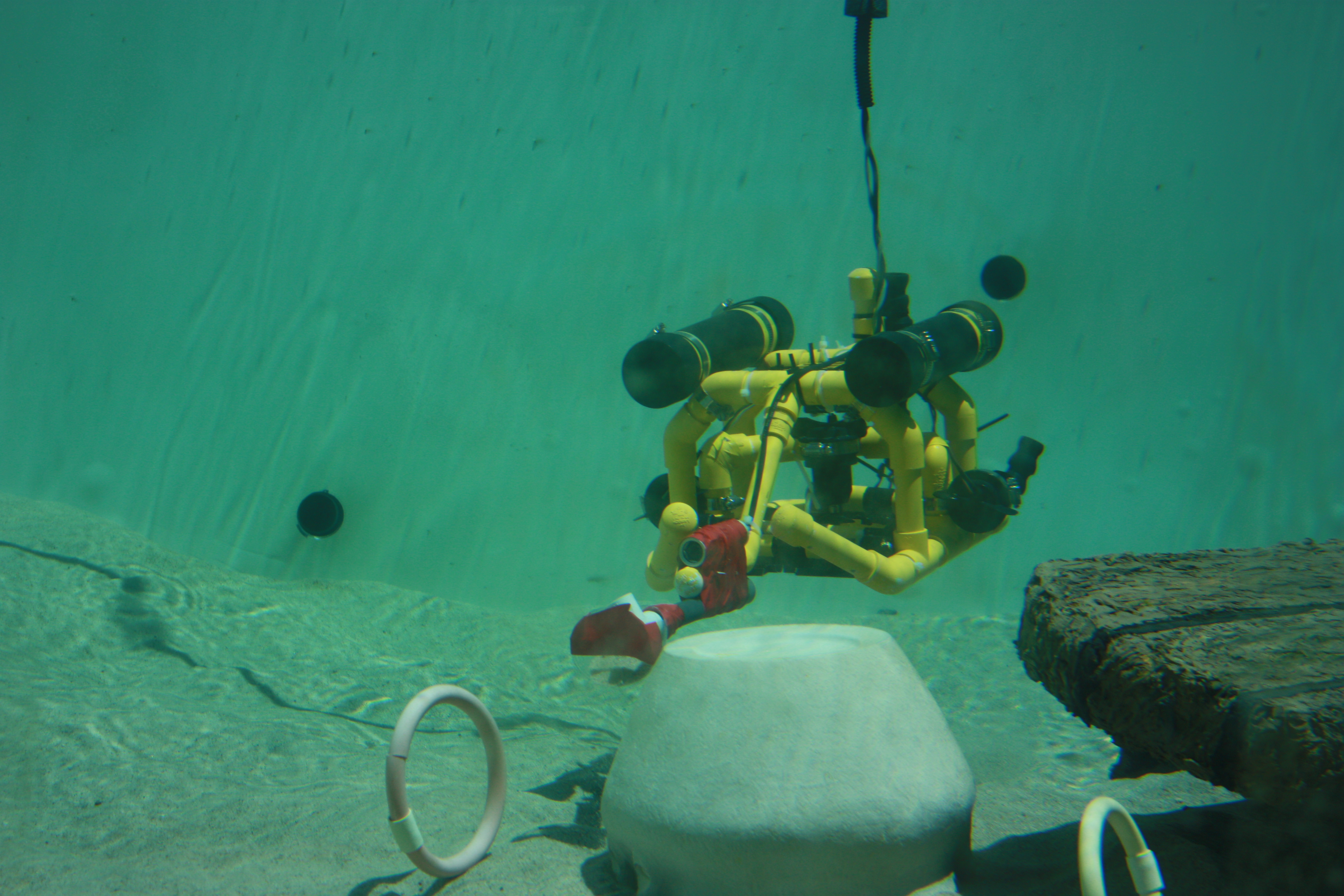
A typical hydrographic ROV configuration includes a video camera, lights, sonar systems, and an articulating arm. The articulating arm can be used for retrieving small objects, cutting lines, or attaching lifting hooks to larger objects. The ROV system includes the vehicle, deck unit, tether management system, hand box controller, laptop computer, and video display. (NOAA 2010)
There are regional ROV contests for high school students. I attended one in Monterey, CA, and it was fun to watch. If the opportunity ever presentes itself, I would like to start one for CO. Here’s info about the one in CA: http://www.marinetech.org/rov_competition/2010/regional_contest.php?rov_competition_id=131