When we set out for Oliktok, things seemed somewhat straightforward — the airplanes had just come off of consecutive campaigns to Utah and Japan where the team did not have to use the remote control transmitter once. It was basically a “launch and monitor” situation where the aircraft’s autopilot did all of the flying, including take-offs and landings. It was natural that we were expecting similar performance for ERASMUS, but soon after arriving, it became apparent that this one would be different. The impact of the USAF radar on our plane’s performance has been substantial, but today we were finally back at a place where we felt we had a pretty good plan for letting the autopilot do its thing. Get the aircraft quickly up to an altitude where we seemed to be out of reach of the radar, and, with the help of multiplexers sent up from CU via Alaska Airlines this past weekend, monitor it very carefully while it performed its profiling, all while keeping the wings as level as possible in order to expose as little target as possible to the radar beam.

The DataHawk flying past the USAF radars, with wings as level as possible.
Unfortunately, the weather had different ideas. This morning started as windy and rainy — Will and I had the first shift and, together with Al, set out and got two hand-flown profiles in. I have to say that both Will and Nathan have done an incredible job hand-flying these profiles. It is not easy to reliably fly an airplane with a 1 m wingspan several hundred meters above your head, but both have done so with great skill and confidence. After flying two profiles to the cloud base around 400 m, it was our turn to come in and get some rest while Nathan and Dale took over profiling duty. However, conditions rapidly deteriorated during their shift, with cloud-level coming down to around 100 m, right near the top of the radar “danger-zone” — insert Top Gun references at will — making it very challenging to even get a plane launched without it either being interfered with by the radar, or reaching into the lowest cloud layers. Therefore, flights were scrapped for the rest of the morning. Will and I headed back out after lunch to see if things had changed, but they had not. We spent the rest of the afternoon getting work done in the USAF facility, including plane preparation and calibration of some of our sensors. With the limited equipment we had, this calibration exercise very much felt like a high school science experiment.

Nathan in the USAF science lab — here we’re attempting to calibrate the Infrared temperature sensors we have on board the airplane using a bowl of water whose temperature we can vary.
This evening, we were on the fence about whether to go back out — the clouds were still hanging out at 100 meters, it was still raining, and the temperature had dropped. On the bright side, the winds died down a bit, which was just enough for me to say “let’s give it a go”. So, Will and I headed out with the initial intention of running some tests to see if our new system setup was working correctly. Dale decided to join, and we successfully tested the system. By this time (right around 745 pm), the clouds had lifted somewhat, and we decided to let the autopilot do its thing! The result was two great flights, with most of the time spent between 150-300 m, where the clouds were hanging out. During the second flight, some lower cloud layers (back down to 100 m) started moving in, so after landing we decided not to launch a 9pm flight. Tomorrow the weather is supposed to clear up, and we’re looking to take full advantage!
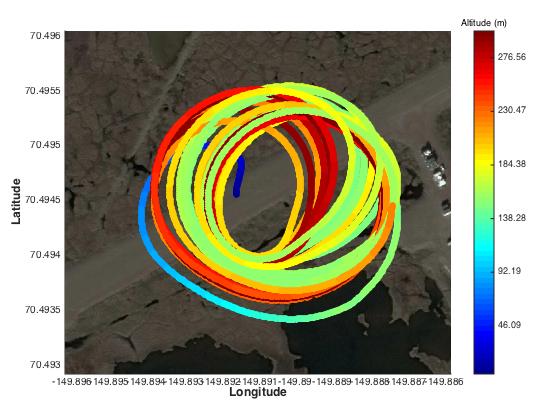
The first autopilot flight flown this evening. As great of a job as Nathan and Will have been doing on the controller, the autopilot is still substantially smoother, improving profile quality.
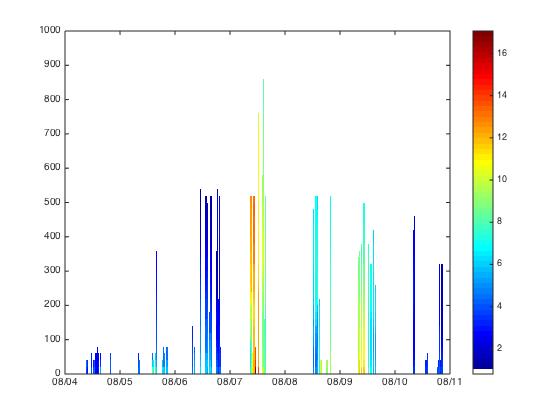
A composite figure of all of the profiles flown since August 4. The colors represent temperature, the horizontal axis represent the dates, and the vertical axis the height (in meters) above the surface.