Well, just like that, this two-week campaign is half over. It has gone quickly, but not at all as I had envisioned it going in. The issues that we’ve been having with radar interference have really made for some long days. Coming in, the plan was for our four team members to split up into two teams of two, and work shifts of four hours at a time. That way, everyone would get at least some rest during the day to keep up with laundry, exercise, sleeping, or whatever. But because of the issues we’ve been having, all four of us have basically been going for 14 hours per day, and I can tell that it’s starting to take its toll. As deflating as the interference issues can be, I think that the fact that some of the air has been let out of the balloon is just simply people needing some more rest.
This morning, we got up and got ready to go. But as we were sitting down for breakfast, it started raining hard enough that flights were not an option. We went out to the AMF to work on aircraft and computer code. It wasn’t long until our friend the grizzly bear came back to visit. Because he was quickly bearing down on the AMF3, we were asked to quickly pack our things and head back to the USAF facility. Apparently, the bear had similar ideas, as he spent about 25 minutes hunting geese in a pond about 10 yards from the radar station. While it was cool to see the bear up close, at this point it would have been better to keep flying!

The grizzly bear that visited us at the AMF and USAF facility today.

The bear peeking over the edge of the Oliktok Point runway, while hunting down foxes.
After lunch, we were able to get back out and continue our operations. During this time, we were able to fly three profiles, and one low level flight. The exciting part here is that one of the profiles and the low-level flight were flown almost entirely by autopilot. During the profile flight, the clouds dropped quickly and at the top of the 500 m profile we found ourselves in cloud. Unfortunately, the water droplets clogged our pitot tube, a small device that can tell us how fast the airplane is moving relative to the air, which made the autopilot think that the airplane had lost all of its airspeed. So it went full throttle and rapidly descended, at which point Nathan took over and brought it in for a safe landing. During the low-altitude flight, the radar got us while flying at 20 m, resulting in an inadvertent landing. In both instances, the autopilot reacted exactly as it should have to the information it was given, but unfortunately outside influences (cloud/rain droplets and electromagnetic interference) led to that information being incorrect!
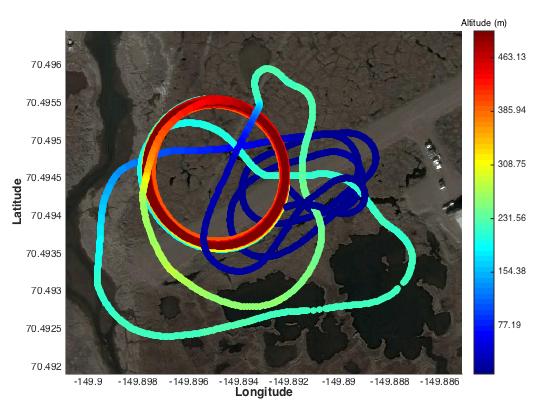
Our first successful autopilot profile — can you tell which parts of the flight were flown by the autopilot and which by the human pilot?
After dinner, we headed back out to take advantage of the good weather conditions. We completed some additional flights, including a substantial amount of additional autopilot control. While we can not avoid the radar interference completely, we’ve found that our best bet to do so is either really close to the surface, or above the radar’s scanning pattern. Therefore, we’ll continue to look to do flights at 5-10 m above the surface, or above 200 m, where the radar does not seem to scan. Tomorrow, we’re supposed to get some parts in from Deadhorse that were shipped up from Colorado when we first figured out that the radar was causing our issues — assuming that the person going to get them can get around the many oil rigs currently moving on the road between here and Deadhorse! These parts should help us to more confidently go after additional profiles from 200 m up.